Kinesisk MIG-sveiserobot av høy kvalitet for sveising av rustfritt stål







Robotkropp
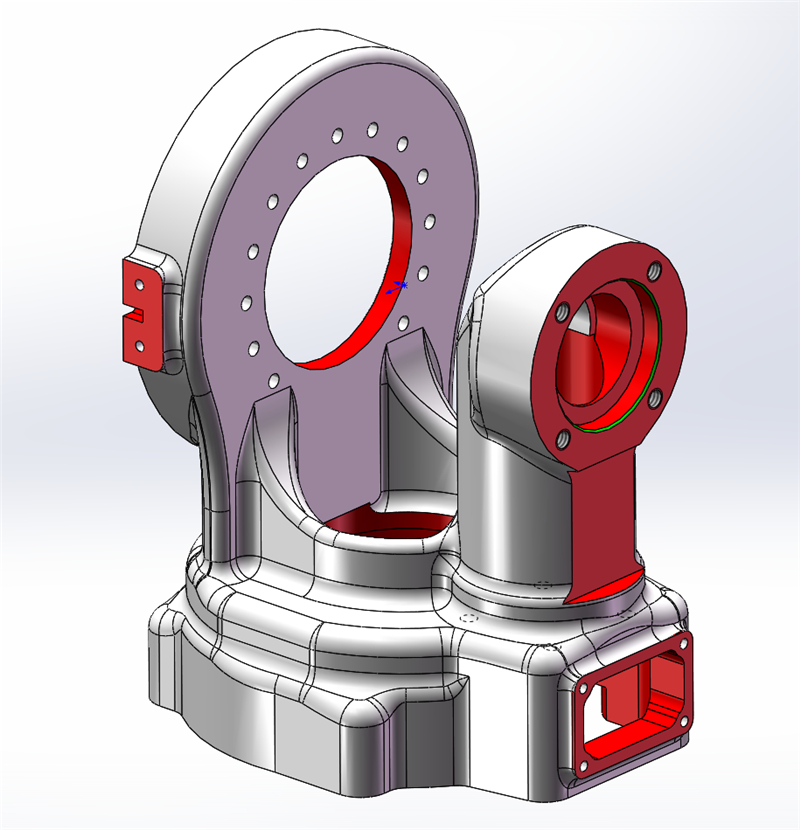
JHY-roboten endrer seg hovedsakelig i støpeprosessen og detaljdesignet av kroppen. Vårt FoU-team har gjort mange innovasjoner i designen av robotkroppen, og eier mer enn ti nye oppfinnelsespatenter.
For eksempel utviklet den sjette aksen en høypresisjonsoverføringsmekanisme og designet armeringsstenger, og den sjette hjulutgangsskiven bruker også girløs design, noe som forbedret robotens nøyaktighet og stabilitet betraktelig. Selv om sveisebrenneren arbeider i en vanskelig stilling, kan den fortsatt sikre stabilitet uten å riste. Dette poenget har blitt bekreftet av våre innenlandske kunder.
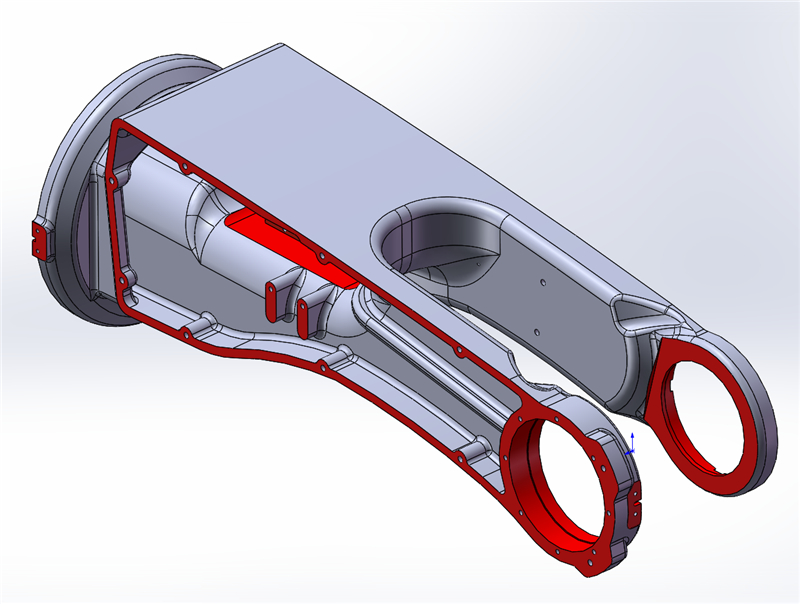
Robotkroppen er produsert med støpeteknologi, noe som gjør robotene våre lettere og har høy tetthet. Forarmen kan være smalere og lengre. Forholdet mellom overarmen og forarmen er nærmere det gylne snitt, slik at de beveger seg mer fleksibelt og raskere.
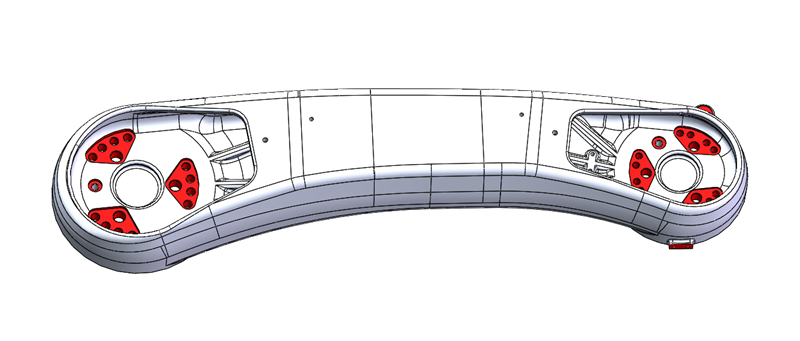
Disposisjonsdesign
Den rette robotens forarmsdesign er enklere og mer elegant. Med en designfølelse, mer i tråd med den europeiske markedsestetikken. Robotkroppsdesignet har søkt om en rekke tekniske patenter, og den nye robotkroppen er mer perfekt.
Toppmerke av ledninger
De interne ledningene og terminalene til roboten er laget av de ledende japanske merkene: DYEDEN, TAIYO, det samme som ABB og Fanuc.
Terminal: Italiensk merke Yierma.
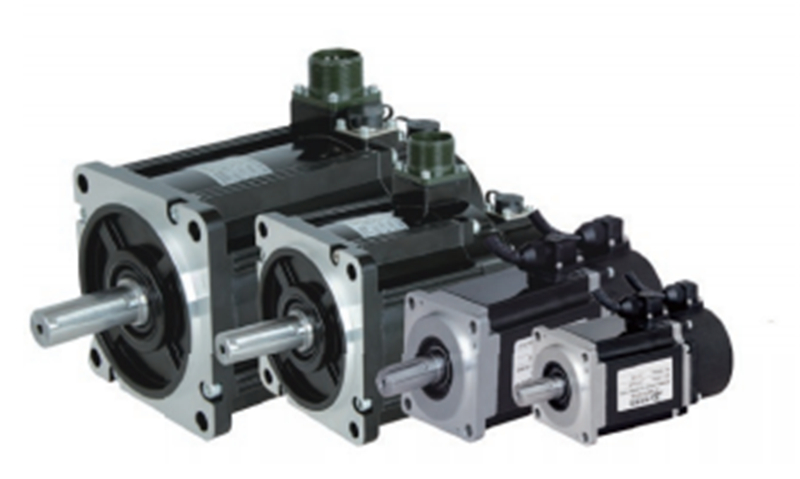
Ledende merker av servomotorer / drivere / reduksjonsgir
Alle bruker de ledende merkene i Kina. Hvert merke har blitt testet og undersøkt i lang tid før den endelige avgjørelsen tas, for å sikre at disse merkene er egnet for bruk av robotene våre og at kvaliteten og ytelsen deres er stabil og pålitelig.
J1- og J2-aksene bruker design med tre eksentriske aksler med et dreiemoment på opptil 65 Nm, noe som reduserer slitasjen på giret og øker levetiden til reduksjonsgiret. JHY-robotens J1- og J3-akse-reduksjonsgir har for tiden den høyeste konfigurasjonen i Kina.
Angående servomotoren, bruker vi nå maksimalt 3kw-motoren til roboter.
For roboter på 1,8 m og 2 m er drivkraften som kreves for 1. og 2. akse større, og kravene til motorkraft er også høyere.
Høypresisjonsmotorene med flere spesifikasjoner kan fullt ut møte applikasjonskravene til roboten vår.

3 år/7500 timer Vedlikeholdsfri
Vedlikeholdet er enkelt, kundene kan enkelt betjene det selv.
Andre patenter og design
6-akset sekundærgir Endret til to belteforbindelser, økte girforholdet og løste problemet med at 6-aksen beveget seg for raskt og unøyaktig. Den sjetteaksede utgangsskiven er designet uten gir, med høypresisjonsgirmekanisme, noe som forbedrer bevegelsesnøyaktigheten til den sjette aksen... For øyeblikket har vi mer enn 30 relaterte patenter for sveiseroboten.
Video
Parametere
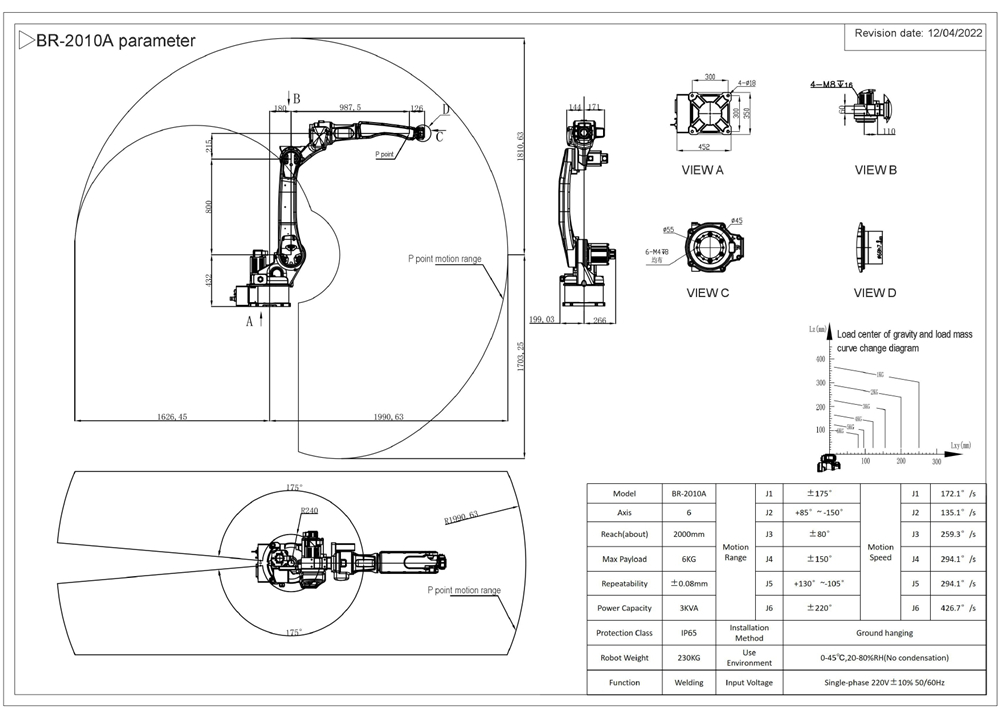
| Modell | BR-2010A | Bevegelsesområde | J1 | ±175° | Bevegelseshastighet | J1 | 172,1°/s |
| Akser | 6 | J2 | +85°~ -150° | J2 | 135,1°/s | ||
| Rekkevidde (omtrent) | 2000 mm | J3 | ±80° | J3 | 259,3°/s | ||
| Maksimal nyttelast | 6 kg | J4 | ±150° | J4 | 294,1°/s | ||
| Repeterbarhet | ±0,08 mm | J5 | +130°~-105° | J5 | 294,1°/s | ||
| Strømkapasitet | 3 kVA | J6 | ±220° | J6 | 426,7°/s | ||
| Beskyttelsesklasse | IP65 | Installasjonsmetode | Bakkehengende | ||||
| Robotvekt | 230 kg | Bruk miljø | 0–45 ℃, 20–80 % RF (ingen kondens) | ||||
| Funksjon | Sveising | Inngangsspenning | Enfase 220V ± 10 % 50/60Hz | ||||
Produktkategorier
-

6-akset MIG-sveiserobot med lavt sprutnivå, rekkevidde 1800 mm
-

6-akset MIG MAG-sveiserobot, rekkevidde 1500 mm med ...
-

Høykvalitets sveiserobot brukt til å sveise møbler
-

JHY 6-akset robotarm industriell automatisk buemaskin ...
-

2000 mm rekkevidde sveiserobot for sveising av karbon...
-

MIG-sveiserobot med 2000 mm spennvidde for rustfrie...